
- Retrait gratuit dans votre magasin Club
- 7.000.000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous
- Retrait gratuit dans votre magasin Club
- 7.000.0000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous


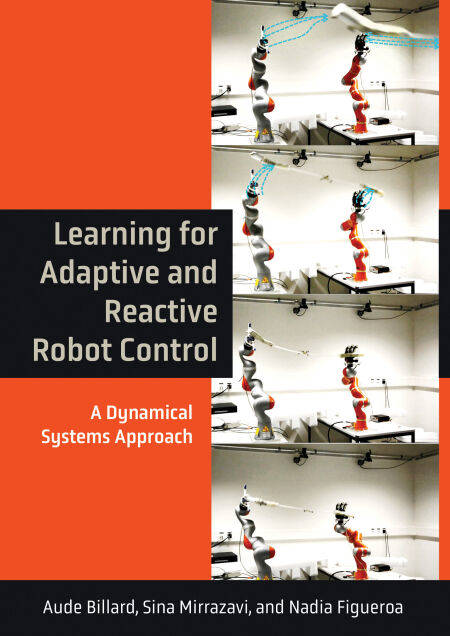
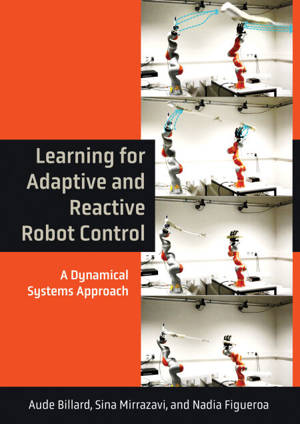
Learning for Adaptive and Reactive Robot Control EBOOK
A Dynamical Systems Approach
Aude Billard, Sina Mirrazavi, Nadia Figueroa
83,78 €
+ 83 points
Format
Description
Methods by which robots can learn control laws that enable real-time reactivity using dynamical systems; with applications and exercises.
This book presents a wealth of machine learning techniques to make the control of robots more flexible and safe when interacting with humans. It introduces a set of control laws that enable reactivity using dynamical systems, a widely used method for solving motion-planning problems in robotics. These control approaches can replan in milliseconds to adapt to new environmental constraints and offer safe and compliant control of forces in contact. The techniques offer theoretical advantages, including convergence to a goal, non-penetration of obstacles, and passivity. The coverage of learning begins with low-level control parameters and progresses to higher-level competencies composed of combinations of skills.
Learning for Adaptive and Reactive Robot Control is designed for graduate-level courses in robotics, with chapters that proceed from fundamentals to more advanced content. Techniques covered include learning from demonstration, optimization, and reinforcement learning, and using dynamical systems in learning control laws, trajectory planning, and methods for compliant and force control .
Features for teaching in each chapter:
applications, which range from arm manipulators to whole-body control of humanoid robots; pencil-and-paper and programming exercises; lecture videos, slides, and MATLAB code examples available on the author’s website . an eTextbook platform website offering protected material[EPS2] for instructors including solutions.
This book presents a wealth of machine learning techniques to make the control of robots more flexible and safe when interacting with humans. It introduces a set of control laws that enable reactivity using dynamical systems, a widely used method for solving motion-planning problems in robotics. These control approaches can replan in milliseconds to adapt to new environmental constraints and offer safe and compliant control of forces in contact. The techniques offer theoretical advantages, including convergence to a goal, non-penetration of obstacles, and passivity. The coverage of learning begins with low-level control parameters and progresses to higher-level competencies composed of combinations of skills.
Learning for Adaptive and Reactive Robot Control is designed for graduate-level courses in robotics, with chapters that proceed from fundamentals to more advanced content. Techniques covered include learning from demonstration, optimization, and reinforcement learning, and using dynamical systems in learning control laws, trajectory planning, and methods for compliant and force control .
Features for teaching in each chapter:
applications, which range from arm manipulators to whole-body control of humanoid robots; pencil-and-paper and programming exercises; lecture videos, slides, and MATLAB code examples available on the author’s website . an eTextbook platform website offering protected material[EPS2] for instructors including solutions.
Spécifications
Parties prenantes
- Auteur(s) :
- Editeur:
Contenu
- Nombre de pages :
- 424
- Langue:
- Anglais
- Collection :
Caractéristiques
- EAN:
- 9780262367011
- Date de parution :
- 07-02-22
- Format:
- Ebook
- Protection digitale:
- Adobe DRM
- Format numérique:
- ePub

Les avis
Nous publions uniquement les avis qui respectent les conditions requises. Consultez nos conditions pour les avis.